12. Reinforcement Learning¶
Reinforcement learning is an area of machine learning concerned with how software agents ought to take actions in an environment so as to maximize some notion of cumulative reward.
12.1. Concepts¶
12.1.1. Elements of Reinforcement Learning¶
Basic Elements
| Term | Description |
|---|---|
| Agent | A model/algorithm that is taked with learning to accomplish a task |
| Environment | The world where agent acts in. |
| Action | A decision the agent makes in an environment |
| Reward Signal | A scalar indication of how well the agent is performing a task |
| State | A description of the environment that can be perceived by the agent |
| Terminal State | A state at which no further actions can be made by an agent |
Algorithms for the Agent
| Term | Description |
|---|---|
Policy (π) |
Function that outputs decisions the agent makes. In simple terms, it instructs what the agent should do at each state. |
| Value Function | Function that describes how good or bad a state is. It is the total amount of reward an agent is predicted to accumulate over the future, starting from a state. |
| Model of Environment | Predicts how the environment will reac tto the agent’s actions. In given a state & action, what is the next state and reward. Such an approach is called a model-based method, in contrast with model-free methods. |
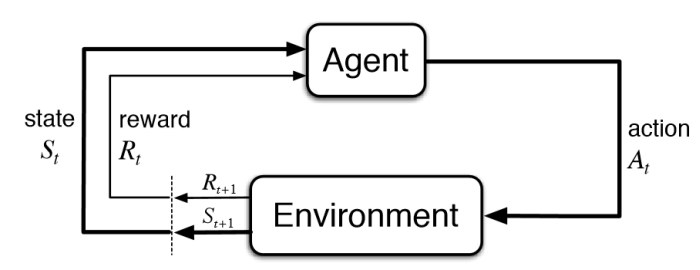
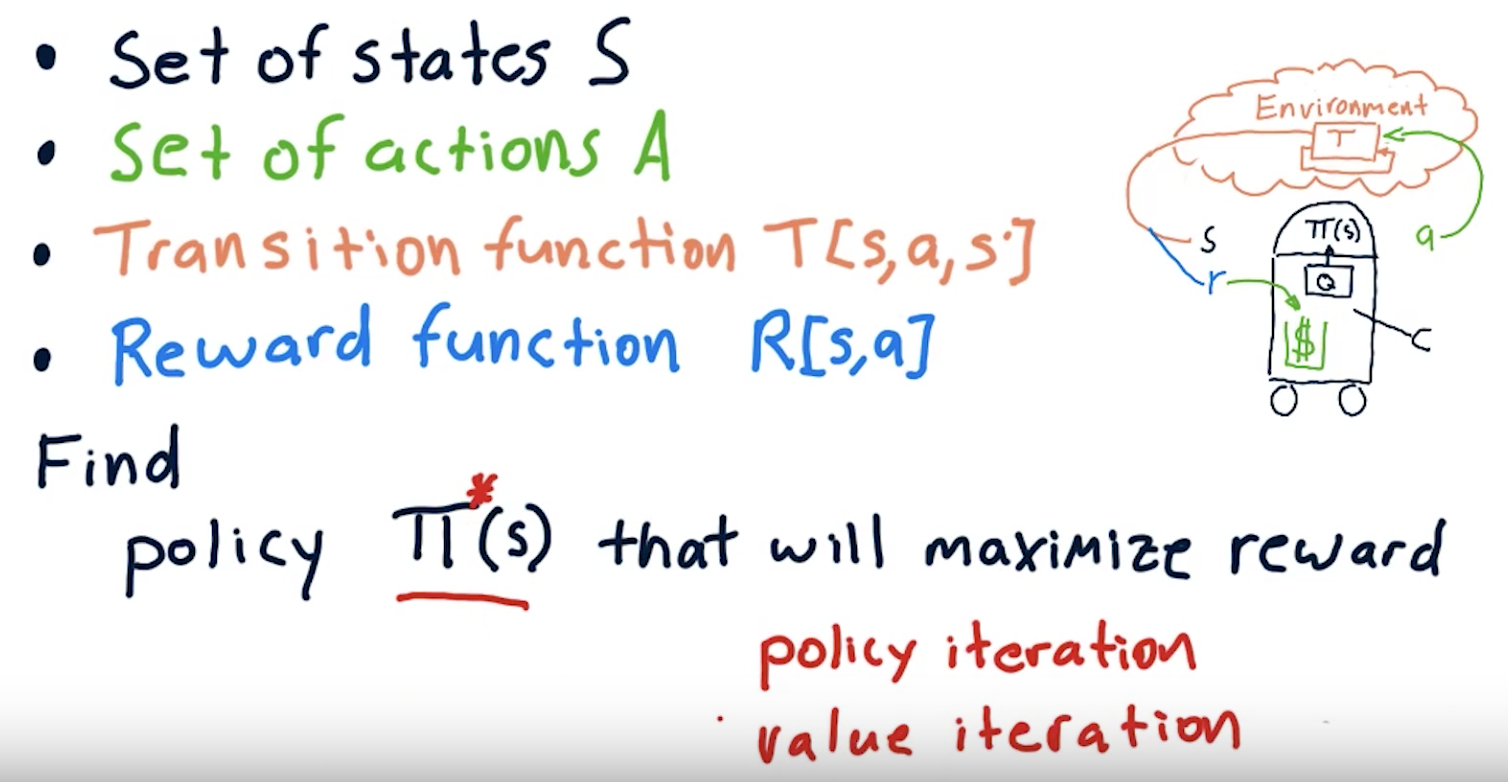
12.1.2. Markov Decision Process¶
Reinforcement learning helps to solve Markov Decision Process (MDP). The core problem of MDPs is to find a “policy” for the decision maker: a function π that specifies the action π(s) that the decision maker will choose when in state s. The diagram illustrate the Markov Decision Process.
Udacity, Machine Learning for Trading
12.2. Q-Learning¶
Q-Learning is an example of model-free reinforcement learning to solve the Markov Decision Process. It derives the policy by directly looking at the data instead of developing a model.
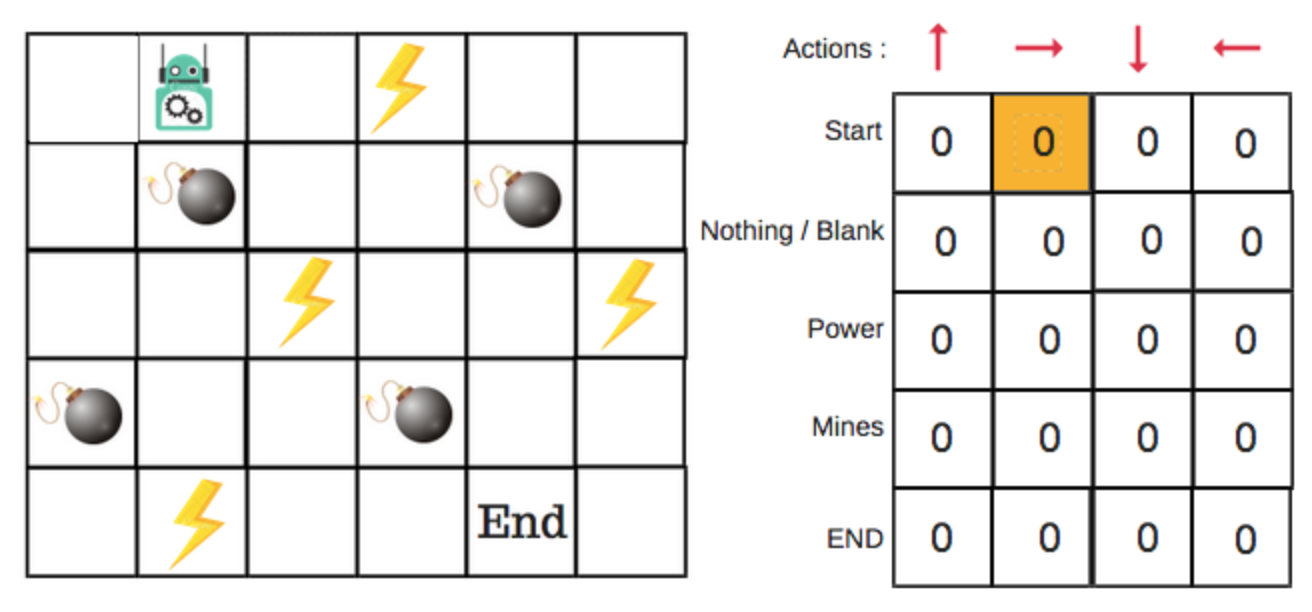
We first build a Q-table with each column as the type of action possible, and then each row as the number of possible states. And initialise the table with all zeros.
from Medium
Updating the function Q uses the following Bellman equation. Algorithms using such equation as an iterative update are called value iteration algorithms.
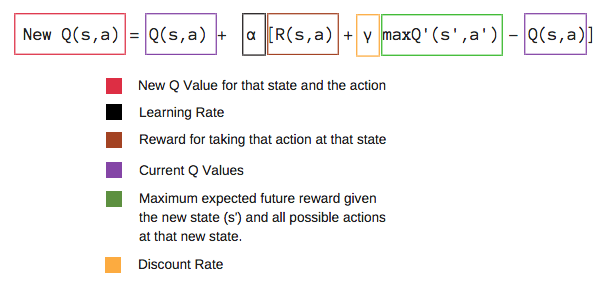
from Medium
Learning Hyperparameters
- Learning Rate (
α): how quickly a network abandons the former value for the new. If the learning rate is 1, the new estimate will be the new Q-value.- Discount Rate (
γ): how much to discount the future reward. The idea is that the later a reward comes, the less valuable it becomes. Think inflation of money in the real world.
Exploration vs Exploitation
A central dilemma of reinforcement learning is to exploit what it has already experienced in order to obtain a reward. But in order to do that, it has to explore in order to make better actions in the future.
This is known as the epsilon greedy strategy. In the beginning, the epsilon rates will be higher. The bot will explore the environment and randomly choose actions. The logic behind this is that the bot does not know anything about the environment. However the more the bot explores the environment, the more the epsilon rate will decreases and the bot starts to exploit the environment.
There are other algothrims to manage the exploration vs exploiation problem, like softmax.
Definitions
- argmax(x): position where the first max value occurs
Code
Start the environment and training parameters for frozen lake in AI gym.
#code snippets from https://gist.github.com/simoninithomas/baafe42d1a665fb297ca669aa2fa6f92#file-q-learning-with-frozenlake-ipynb
import numpy as np
import gym
import random
env = gym.make("FrozenLake-v0")
action_size = env.action_space.n
state_size = env.observation_space.n
qtable = np.zeros((state_size, action_size))
print(qtable)
# define hyperparameters ----------
total_episodes = 15000 # Total episodes
learning_rate = 0.8 # Learning rate
max_steps = 99 # Max steps per episode
gamma = 0.95 # Discounting rate
# Exploration parameters
epsilon = 1.0 # Exploration rate
max_epsilon = 1.0 # Exploration probability at start
min_epsilon = 0.01 # Minimum exploration probability
decay_rate = 0.005 # Exponential decay rate for exploration prob
Train and generate the Q-table.
# generate Q-table ------------
# List of rewards
rewards = []
# 2 For life or until learning is stopped
for episode in range(total_episodes):
# Reset the environment
state = env.reset()
step = 0
done = False
total_rewards = 0
for step in range(max_steps):
# 3. Choose an action a in the current world state (s)
## First we randomize a number
exp_exp_tradeoff = random.uniform(0, 1)
## If this number > greater than epsilon --> exploitation (taking the biggest Q value for this state)
if exp_exp_tradeoff > epsilon:
action = np.argmax(qtable[state,:])
# Else doing a random choice --> exploration
else:
action = env.action_space.sample()
# Take the action (a) and observe the outcome state(s') and reward (r)
new_state, reward, done, info = env.step(action)
# Update Q(s,a):= Q(s,a) + lr [R(s,a) + gamma * max Q(s',a') - Q(s,a)]
# qtable[new_state,:] : all the actions we can take from new state
qtable[state, action] = qtable[state, action] + learning_rate * (reward + gamma * np.max(qtable[new_state, :]) - qtable[state, action])
total_rewards += reward
# Our new state is state
state = new_state
# If done (if we're dead) : finish episode
if done == True:
break
# Reduce epsilon (because we need less and less exploration)
epsilon = min_epsilon + (max_epsilon - min_epsilon)*np.exp(-decay_rate*episode)
rewards.append(total_rewards)
print ("Score over time: " + str(sum(rewards)/total_episodes))
print(qtable)
Rerun the game using the Q-table generated.
env.reset()
for episode in range(5):
state = env.reset()
step = 0
done = False
print("****************************************************")
print("EPISODE ", episode)
for step in range(max_steps):
# Take the action (index) that have the maximum expected future reward given that state
action = np.argmax(qtable[state,:])
new_state, reward, done, info = env.step(action)
if done:
# Here, we decide to only print the last state (to see if our agent is on the goal or fall into an hole)
env.render()
# We print the number of step it took.
print("Number of steps", step)
break
state = new_state
env.close()
12.3. Resources¶
- https://towardsdatascience.com/reinforcement-learning-implement-grid-world-from-scratch-c5963765ebff
- https://medium.com/swlh/introduction-to-reinforcement-learning-coding-q-learning-part-3-9778366a41c0
- https://medium.com/@m.alzantot/deep-reinforcement-learning-demysitifed-episode-2-policy-iteration-value-iteration-and-q-978f9e89ddaa
- https://medium.com/emergent-future/simple-reinforcement-learning-with-tensorflow-part-0-q-learning-with-tables-and-neural-networks-d195264329d0